NKTg = f(x, v, m) NKTg₁ = x × p NKTg₂ = (dm/dt) × p
| 1. English (English) | 8. Russian (Русский) | 15. Turkish (Türkçe) |
| 2. French (Français) | 9. Portuguese (Português) | 16. Persian (فارسی) |
| 3. Vietnamese (Tiếng Việt) | 10. Arabic (العربية) | 17. Hebrew (עברית) |
| 4. Chinese (简体中文) | 11. Korean (한국어) | 18. Swedish (Svenska) |
| 5. German (Deutsch) | 12. Italian (Italiano) | 19. Greek (Ελληνικά) |
| 6. Japanese (日本語) | 13. Dutch (Nederlands) | 20. Indonesian (Bahasa Indonesia) |
| 7. Spanish (Español) | 14. Polish (Polski) | 21. Hindi (हिन्दी) |
1. English (English)
PUBLICATION OF SOFTWARE DESCRIPTION AND ALGORITHM FOR THE NKTg LAW OF VARIABLE INERTIA © 2026 Nguyen Khanh Tung. All rights reserved.
I. GENERAL INFORMATION
- Software Name: NKTg Dynamics Calculator.
- Author: Nguyen Khanh Tung
- Programming Languages: C++ (ISO/IEC 14882) and Assembly (x64).
II. THEORETICAL BASIS: NKTg LAW OF VARIABLE INERTIA The software operates based on the principles of the NKTg Law:
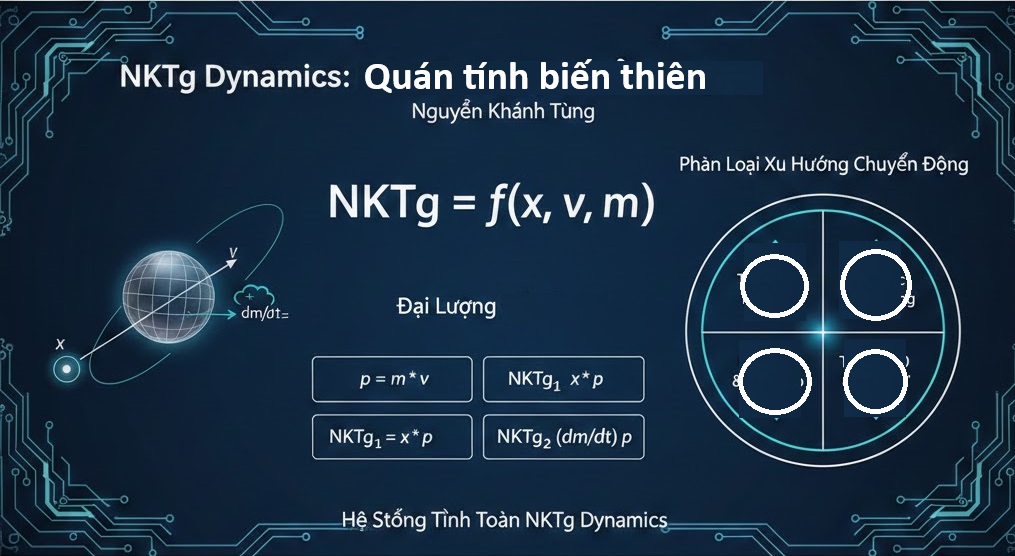
- Fundamental Relationship: Movement tendency depends on position (x), velocity (v), and mass (m).
- Formula: NKTg = f(x, v, m).
- Core Product Quantities:
- Momentum (p): p = m × v
- NKTg₁ Quantity: The product of position and momentum (NKTg₁ = x × p).
- NKTg₂ Quantity: The product of the rate of mass change and momentum (NKTg₂ = (dm/dt) × p).
- Measurement Unit: NKTm (Unit of variable inertia).
III. DETAILED ALGORITHM DESCRIPTION 1. Data Processing Procedure The algorithm analyzes movement tendencies through logical steps:
- Step 1: Receive input parameters: position (x), velocity (v), mass (m), and rate of mass change (dm/dt).
- Step 2: Calculate linear momentum p = m × v.
- Step 3: Calculate variable inertia values NKTg₁ and NKTg_2.
- Step 4: Classify tendencies (Tendency) based on the sign of the values:
- NKTg₁ > 0: Moving away from the stable state.
- NKTg₁ < 0: Moving toward the stable state.
- NKTg₂> 0: Mass variation supports movement.
- NKTg₂< 0: Mass variation resists movement.
IV. EXECUTION SOURCE CODE 1. High-Level Source Code (C++)
C++
#include <cstdio>
/**
* Variable Inertia calculation library according to the NKTg Law
* All copyrights reserved regarding calculation logic and tendency definitions.
*/
int main() {
// 1. Declare parameters: x (position), v (velocity), m (mass), dm_dt (mass change rate)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Perform calculations according to the NKTg Law
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Output results in Record format
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Movement Tendency Classification
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Moving away from stable state” :
n1 < 0 ? “Moving toward stable state” : “Stable equilibrium”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Mass variation supports movement” :
n2 < 0 ? “Mass variation resists movement” : “No mass variation effect”);
return 0;
}
2. Low-Level Source Code (Assembly x64)
; NKTg processing logic at the microprocessor register level
; Inputs: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; load m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; load x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; load dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINITION OF STABLE STATE The stable state in this software is defined as the state where position (x), velocity (v), and mass (m) interact to maintain the movement structure, avoid loss of control, and preserve the inherent movement pattern of the object.
2 French (Français)
PUBLICATION DU DOSSIER DE DESCRIPTION DU LOGICIEL ET DE L’ALGORITHME DE LA LOI NKTg SUR L’INERTIE VARIABLE © 2026 Nguyen Khanh Tung. Tous droits réservés.
I. INFORMATIONS GÉNÉRALES
- Nom du logiciel : Calculateur de Dynamique NKTg (NKTg Dynamics Calculator).
- Auteur : Nguyen Khanh Tung
- Langages de programmation : C++ (ISO/IEC 14882) et Assembly (x64).
II. BASE THÉORIQUE : LA LOI NKTg SUR L’INERTIE VARIABLE Le logiciel s’exécute selon les principes de la Loi NKTg :
- Relation fondamentale : La tendance du mouvement dépend de la position (x), de la vitesse (v) et de la masse (m).
- Formule : NKTg = f(x, v, m).
- Grandeurs produits fondamentales :
- Quantité de mouvement (p) : p = m × v
- Grandeur NKTg₁ : Produit de la position et de la quantité de mouvement (NKTg₁ = x × p).
- Grandeur NKTg₂ : Produit du taux de variation de la masse et de la quantité de mouvement (NKTg₂ = (dm/dt) × p).
- Unité de mesure : NKTm (Unité d’inertie variable).
III. DESCRIPTION DÉTAILLÉE DE L’ALGORITHME 1. Processus de traitement des données L’algorithme analyse les tendances du mouvement via des étapes logiques :
- Étape 1 : Réception des paramètres d’entrée : position (x), vitesse (v), masse (m) et taux de variation de la masse (dm/dt).
- Étape 2 : Calcul de la quantité de mouvement linéaire p = m × v.
- Étape 3 : Calcul des valeurs d’inertie variable NKTg₁ et NKTg_2.
- Étape 4 : Classification de la tendance (Tendency) basée sur le signe des valeurs :
- NKTg₁ > 0 : S’éloigne de l’état stable.
- NKTg₁ < 0 : Se rapproche de l’état stable.
- NKTg₂> 0 : La variation de masse soutient le mouvement.
- NKTg₂< 0 : La variation de masse entrave le mouvement.
IV. CODE SOURCE D’EXÉCUTION 1. Code source de haut niveau (C++)
C++
#include <cstdio>
/**
* Bibliothèque de calcul de l’Inertie Variable selon la Loi NKTg
* Tous droits d’auteur réservés concernant la logique de calcul et les définitions de tendance.
*/
int main() {
// 1. Déclaration des paramètres : x (position), v (vitesse), m (masse), dm_dt (taux de variation de m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Exécution des calculs selon la Loi NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Sortie des résultats au format Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Classification de la tendance du mouvement
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “S’éloigne de l’état stable” :
n1 < 0 ? “Se rapproche de l’état stable” : “Équilibre stable”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “La variation de masse soutient le mouvement” :
n2 < 0 ? “La variation de masse entrave le mouvement” : “Aucun effet de variation de masse”);
return 0;
}
2. Code source de bas niveau (Assembly x64)
; Logique de traitement NKTg au niveau des registres du microprocesseur
; Entrées : xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; charger m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; charger x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; charger dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DÉFINITION DE L’ÉTAT STABLE L’état stable dans ce logiciel est défini comme l’état dans lequel la position (x), la vitesse (v) et la masse (m) interagissent pour maintenir la structure du mouvement, éviter la perte de contrôle et préserver le modèle de mouvement intrinsèque de l’objet.
3. CÔNG BỐ HỒ SƠ MÔ TẢ PHẦN MỀM VÀ GIẢI THUẬT ĐỊNH LUẬT NKTg VỀ QUÁN TÍNH BIẾN THIÊN © 2026 Nguyễn Khánh Tùng. All rights reserved.
I. THÔNG TIN CHUNG
- Tên phần mềm: Hệ thống tính toán Quán tính biến thiên NKTg (NKTg Dynamics Calculator).
- Tác giả: Nguyễn Khánh Tùng
- Ngôn ngữ lập trình: C++ (ISO/IEC 14882) và Assembly (x64).
II. CƠ SỞ LÝ THUYẾT: ĐỊNH LUẬT NKTg VỀ QUÁN TÍNH BIẾN THIÊN
Phần mềm thực thi dựa trên các nguyên lý của Định luật NKTg:
- Mối quan hệ cơ bản: Xu hướng chuyển động phụ thuộc vào vị trí (x), tốc độ (v) và khối lượng (m). Công thức: NKTg = f(x, v, m).
- Các đại lượng sản phẩm cốt lõi:
- Động lượng (p): p = m × v
- Đại lượng NKTg₁: Sản phẩm của vị trí và động lượng (NKTg₁ = x × p).
- Đại lượng NKTg₂: Sản phẩm của tốc độ biến thiên khối lượng và động lượng (NKTg₂ = (dm/dt) × p).
- Đơn vị đo lường: NKTm (Đơn vị của quán tính biến thiên).
III. MÔ TẢ GIẢI THUẬT CHI TIẾT
1. Quy trình xử lý dữ liệu
Giải thuật thực hiện phân tích xu hướng chuyển động qua các bước logic:
- Bước 1: Tiếp nhận thông số đầu vào: vị trí (x), vận tốc (v), khối lượng (m) và tốc độ thay đổi khối lượng (dm/dt).
- Bước 2: Tính toán động lượng tuyến tính p = m × v.
- Bước 3: Tính toán giá trị quán tính biến thiên NKTg₁ và NKTg₂.
- Bước 4: Phân loại xu hướng (Tendency) dựa trên dấu của giá trị:
- NKTg₁ > 0: Rời xa trạng thái ổn định.
- NKTg₁ < 0: Tiến về trạng thái ổn định.
- NKTg₂ > 0: Biến thiên khối lượng hỗ trợ chuyển động.
- NKTg₂ < 0: Biến thiên khối lượng cản trở chuyển động.
IV. MÃ NGUỒN THỰC THI (SOURCE CODE)
1. Mã nguồn bậc cao (C++)
C++
#include <cstdio>
/**
* Thư viện tính toán Quán tính biến thiên theo Định luật NKTg
* Bảo lưu mọi quyền tác giả đối với logic tính toán và định nghĩa xu hướng.
*/
int main() {
// 1. Khai báo tham số: x (vị trí), v (vận tốc), m (khối lượng), dm_dt (tốc độ biến thiên m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Thực hiện tính toán theo Định luật NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Xuất kết quả định dạng Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Phân loại xu hướng chuyển động (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Moving away from stable state” :
n1 < 0 ? “Moving toward stable state” : “Stable equilibrium”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Mass variation supports movement” :
n2 < 0 ? “Mass variation resists movement” : “No mass variation effect”);
return 0;
}
2. Mã nguồn mức thấp (Assembly x64)
; Logic xử lý NKTg tại tầng thanh ghi vi xử lý
; Đầu vào: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; nạp m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; nạp x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; nạp dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. ĐỊNH NGHĨA TRẠNG THÁI ỔN ĐỊNH
Trạng thái ổn định trong phần mềm này được định nghĩa là trạng thái mà tại đó vị trí (x), tốc độ (v) và khối lượng (m) tương tác để duy trì cấu trúc chuyển động, tránh mất kiểm soát và bảo toàn mô thức chuyển động vốn có của vật thể.
4. Chinese (简体中文)
变惯性 NKTg 定律之软件描述与算法文档公告 © 2026 Nguyễn Khánh Tùng。版权所有。
I. 基本信息
- 软件名称: NKTg 变惯性动力学计算系统 (NKTg Dynamics Calculator)。
- 作者: Nguyễn Khánh Tùng
- 编程语言: C++ (ISO/IEC 14882) 和 汇编 (x64)。
II. 理论基础:变惯性 NKTg 定律 本软件基于 NKTg 定律的原理运行:
- 基本关系: 运动趋势取决于位置 (x)、速度 (v) 和质量 (m)。
- 公式: NKTg = f(x, v, m)。
- 核心产出量:
- 动量 (p): p = m × v
- NKTg₁ 量: 位置与动量的乘积 (NKTg₁ = x × p)。
- NKTg₂ 量: 质量变化率与动量的乘积 (NKTg₂ = (dm/dt) × p)。
- 计量单位: NKTm (变惯量单位)。
III. 详细算法描述 1. 数据处理流程 该算法通过以下逻辑步骤分析运动趋势:
- 步骤 1: 接收输入参数:位置 (x)、速度 (v)、质量 (m) 和质量变化率 (dm/dt)。
- 步骤 2: 计算线性动量 p = m × v。
- 步骤 3: 计算变惯性值 NKTg₁ 和 NKTg_2。
- 步骤 4: 根据值的正负号对趋势 (Tendency) 进行分类:
- NKTg₁ > 0:远离稳定状态。
- NKTg₁ < 0:趋向稳定状态。
- NKTg₂> 0:质量变化支持运动。
- NKTg₂< 0:质量变化阻碍运动。
IV. 执行源代码 (SOURCE CODE) 1. 高级源代码 (C++)
C++
#include <cstdio>
/** [cite: 31]
* 根据 NKTg 定律计算变惯性的库 [cite: 32]
* 保留有关计算逻辑和趋势定义的所有著作权。 [cite: 33]
*/
int main() {
// 1. 声明参数:x (位置), v (速度), m (质量), dm_dt (质量变化率 m) [cite: 36]
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. 根据 NKTg 定律执行计算 [cite: 38]
double p = m * v; // p = m * v [cite: 39]
double n1 = x * p; // NKTg1 = x * p [cite: 40]
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p [cite: 41]
// 3. 以 Record 格式输出结果 [cite: 42]
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// 运动趋势分类 (Tendency Classification) [cite: 44]
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “远离稳定状态” :
n1 < 0 ? “趋向稳定状态” : “稳定平衡”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “质量变化支持运动” :
n2 < 0 ? “质量变化阻碍运动” : “无质量变化效应”);
return 0;
}
2. 低级源代码 (汇编 x64)
; 微处理器寄存器层的 NKTg 处理逻辑 [cite: 55]
; 输入:xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt) [cite: 56]
movsd xmm4, xmm2 ; 加载 m [cite: 57]
mulsd xmm4, xmm1 ; p = m * v [cite: 58]
movsd xmm5, xmm0 ; 加载 x [cite: 59]
mulsd xmm5, xmm4 ; NKTg1 = x * p [cite: 60]
movsd xmm6, xmm3 ; 加载 dm/dt [cite: 61]
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p [cite: 62]
V. 稳定状态定义 本软件中的稳定状态定义为:位置 (x)、速度 (v) 和质量 (m) 相互作用以维持运动结构、避免失控并保持物体固有运动模式的状态。
5. German (Deutsch)
BEKANNTMACHUNG DER SOFTWAREBESCHREIBUNG UND DES ALGORITHMUS FÜR DAS NKTg-GESETZ DER VARIABLEN TRÄGHEIT © 2026 Nguyễn Khánh Tùng. Alle Rechte vorbehalten.
I. ALLGEMEINE INFORMATIONEN
- Softwarename: NKTg-Rechner für variable Dynamik (NKTg Dynamics Calculator).
- Autor: Nguyễn Khánh Tùng
- Programmiersprachen: C++ (ISO/IEC 14882) und Assembly (x64).
II. THEORETISCHE GRUNDLAGE: DAS NKTg-GESETZ DER VARIABLEN TRÄGHEIT Die Software arbeitet auf Basis der Prinzipien des NKTg-Gesetzes:
- Grundlegende Beziehung: Die Bewegungstendenz hängt von der Position (x), der Geschwindigkeit (v) und der Masse (m) ab.
- Formel: NKTg = f(x, v, m).
- Kernproduktgrößen:
- Impuls (p): p = m × v
- Größe NKTg₁: Produkt aus Position und Impuls (NKTg₁ = x × p).
- Größe NKTg₂: Produkt aus der Massenänderungsrate und dem Impuls (NKTg₂ = (dm/dt) × p).
- Maßeinheit: NKTm (Einheit der variablen Trägheit).
III. DETAILLIERTE ALGORITHMUS-BESCHREIBUNG 1. Datenverarbeitungsprozess Der Algorithmus analysiert Bewegungstendenzen durch logische Schritte:
- Schritt 1: Empfang der Eingabeparameter: Position (x), Geschwindigkeit (v), Masse (m) und Massenänderungsrate (dm/dt).
- Schritt 2: Berechnung des linearen Impulses p = m × v.
- Schritt 3: Berechnung der variablen Trägheitswerte NKTg₁ und NKTg_2.
- Schritt 4: Klassifizierung der Tendenz basierend auf dem Vorzeichen der Werte:
- NKTg₁ > 0: Entfernung vom stabilen Zustand.
- NKTg₁ < 0: Annäherung an den stabilen Zustand.
- NKTg₂> 0: Massenänderung unterstützt die Bewegung.
- NKTg₂< 0: Massenänderung behindert die Bewegung.
IV. QUELLCODE DER IMPLEMENTIERUNG 1. Hochsprachen-Quellcode (C++)
C++
#include <cstdio>
/**
* Bibliothek zur Berechnung der variablen Trägheit nach dem NKTg-Gesetz.
* Alle Urheberrechte bezüglich der Berechnungslogik und der Tendenzdefinitionen vorbehalten.
*/
int main() {
// 1. Parameter deklarieren: x (Position), v (Geschwindigkeit), m (Masse), dm_dt (Massenänderungsrate)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Berechnung nach dem NKTg-Gesetz durchführen
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Ergebnisse im Record-Format ausgeben
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Klassifizierung der Bewegungstendenz (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Entfernung vom stabilen Zustand” :
n1 < 0 ? “Annäherung an den stabilen Zustand” : “Stabiles Gleichgewicht”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Massenänderung unterstützt die Bewegung” :
n2 < 0 ? “Massenänderung behindert die Bewegung” : “Kein Effekt der Massenänderung”);
return 0;
}
2. Maschinennaher Quellcode (Assembly x64)
; NKTg-Verarbeitungslogik auf Mikroprozessorebene (Register)
; Eingabe: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; m laden
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; x laden
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; dm/dt laden
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINITION DES STABILEN ZUSTANDS Der stabile Zustand wird in dieser Software als ein Zustand definiert, in dem Position (x), Geschwindigkeit (v) und Masse (m) so zusammenwirken, dass die Bewegungsstruktur aufrechterhalten, Kontrollverlust vermieden und das inhärente Bewegungsmuster des Objekts bewahrt wird.
6. Japanese (日本語)
NKTg 可変慣性法則に関するソフトウェア記述およびアルゴリズムの公開 © 2026 Nguyễn Khánh Tùng. All rights reserved.
I. 一般情報
- ソフトウェア名称: NKTg 可変慣性力学計算システム (NKTg Dynamics Calculator).
- 作成者: Nguyễn Khánh Tùng
- プログラミング言語: C++ (ISO/IEC 14882) および Assembly (x64).
II. 理論的基礎:NKTg 可変慣性法則 本ソフトウェアは NKTg 法則の原理に基づいて実行されます:
- 基本関係: 運動傾向は、位置 (x)、速度 (v)、および質量 (m) に依存します。
- 公式: NKTg = f(x, v, m).
- コア産出量:
- 運動量 (p): p = m × v
- NKTg₁ 量: 位置と運動量の積 (NKTg₁ = x × p).
- NKTg₂ 量: 質量変化率と運動量の積 (NKTg₂ = (dm/dt) × p).
- 測定単位: NKTm (可変慣性の単位).
III. アルゴリズムの詳細説明 1. データ処理手順 アルゴリズムは論理的なステップを通じて運動傾向を分析します:
- ステップ 1: 入力パラメータの受信:位置 (x)、速度 (v)、質量 (m)、および質量変化率 (dm/dt)。
- ステップ 2: 線形運動量 p = m × v の計算。
- ステップ 3: 可変慣性値 NKTg₁ および NKTg₂の計算。
- ステップ 4: 値の符号に基づく傾向 (Tendency) の分類:
- NKTg₁ > 0: 安定状態から離脱。
- NKTg₁ < 0: 安定状態へ接近。
- NKTg₂> 0: 質量変化が運動を促進。
- NKTg₂< 0 : 質量変化が運動を阻害。
IV. 実行ソースコード 1. 高水準言語ソースコード (C++)
C++
#include <cstdio>
/**
* NKTg 法則に基づく可変慣性計算ライブラリ
* 計算ロジックおよび傾向の定義に関するすべての著作権を留保します。
*/
int main() {
// 1. パラメータ宣言:x (位置), v (速度), m (質量), dm_dt (質量変化率)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. NKTg 法則に従って計算を実行
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. レコード形式で結果を出力
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// 運動傾向の分類 (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “安定状態から離脱” :
n1 < 0 ? “安定状態へ接近” : “安定的平衡”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “質量変化が運動を促進” :
n2 < 0 ? “質量変化が運動を阻害” : “質量変化の影響なし”);
return 0;
}
2. 低水準言語ソースコード (Assembly x64)
; マイクロプロセッサ・レジスタ層における NKTg 処理ロジック
; 入力:xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; m をロード
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; x をロード
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; dm/dt をロード
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. 安定状態の定義 本ソフトウェアにおける安定状態とは、位置 (x)、速度 (v)、および質量 (m) が相互に作用し、運動構造を維持し、制御不能を回避し、物体の固有の運動パターンを保持する状態と定義されます。
7. Spanish (Español)
PUBLICACIÓN DEL EXPEDIENTE DE DESCRIPCIÓN DEL SOFTWARE Y ALGORITMO DE LA LEY NKTg DE INERCIA VARIABLE © 2026 Nguyễn Khánh Tùng. Todos los derechos reservados.
I. INFORMACIÓN GENERAL
- Nombre del software: Sistema de cálculo de Dinámica de Inercia Variable NKTg (NKTg Dynamics Calculator).
- Autor: Nguyễn Khánh Tùng
- Lenguajes de programación: C++ (ISO/IEC 14882) y Assembly (x64).
II. BASE TEÓRICA: LEY NKTg DE INERCIA VARIABLE El software se ejecuta basado en los principios de la Ley NKTg:
- Relación fundamental: La tendencia del movimiento depende de la posición (x), la velocidad (v) y la masa (m).
- Fórmula: NKTg = f(x, v, m).
- Magnitudes de producto principales:
- Momento lineal (p): p = m × v
- Magnitud NKTg₁: Producto de la posición y el momento (NKTg₁ = x × p).
- Magnitud NKTg₂: Producto de la tasa de variación de la masa y el momento (NKTg₂ = (dm/dt) × p).
- Unidad de medida: NKTm (Unidad de inercia variable).
III. DESCRIPCIÓN DETALLADA DEL ALGORITMO 1. Proceso de tratamiento de datos El algoritmo analiza las tendencias del movimiento a través de pasos lógicos:
- Paso 1: Recepción de parámetros de entrada: posición (x), velocidad (v), masa (m) y tasa de cambio de masa (dm/dt).
- Paso 2: Cálculo del momento lineal p = m × v.
- Paso 3: Cálculo de los valores de inercia variable NKTg₁ y NKTg_2.
- Paso 4: Clasificación de la tendencia (Tendency) basada en el signo de los valores:
- NKTg₁ > 0: Alejándose del estado estable.
- NKTg₁ < 0: Acercándose al estado estable.
- NKTg₂> 0: La variación de masa apoya el movimiento.
- NKTg₂< 0: La variación de masa resiste el movimiento.
IV. CÓDIGO FUENTE DE EJECUCIÓN 1. Código fuente de alto nivel (C++)
C++
#include <cstdio>
/**
* Biblioteca de cálculo de Inercia Variable según la Ley NKTg
* Reservados todos los derechos de autor sobre la lógica de cálculo y definición de tendencias.
*/
int main() {
// 1. Declaración de parámetros: x (posición), v (velocidad), m (masa), dm_dt (tasa de variación de m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Realizar cálculos según la Ley NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Exportar resultados en formato Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Clasificación de la tendencia del movimiento (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Alejándose del estado estable” :
n1 < 0 ? “Acercándose al estado estable” : “Equilibrio estable”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “La variación de masa apoya el movimiento” :
n2 < 0 ? “La variación de masa resiste el movimiento” : “Sin efecto de variación de masa”);
return 0;
}
2. Código fuente de bajo nivel (Assembly x64)
; Lógica de procesamiento NKTg a nivel de registros del microprocesador
; Entradas: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; cargar m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; cargar x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; cargar dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINICIÓN DE ESTADO ESTABLE El estado estable en este software se define como el estado en el que la posición (x), la velocidad (v) y la masa (m) interactúan para mantener la estructura del movimiento, evitar la pérdida de control y preservar el patrón de movimiento inherente del objeto.
8. Russian (Русский)
ПУБЛИКАЦИЯ ОПИСАНИЯ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ И АЛГОРИТМА ЗАКОНА NKTg О ПЕРЕМЕННОЙ ИНЕРЦИИ © 2026 Нгуен Кхань Тунг. Все права защищены.
I. ОБЩАЯ ИНФОРМАЦИЯ
- Название ПО: Система расчета динамики переменной инерции NKTg (NKTg Dynamics Calculator).
- Автор: Нгуен Кхань Тунг
- Языки программирования: C++ (ISO/IEC 14882) и Ассемблер (x64).
II. ТЕОРЕТИЧЕСКАЯ БАЗА: ЗАКОН NKTg О ПЕРЕМЕННОЙ ИНЕРЦИИ Программное обеспечение работает на основе принципов Закона NKTg:
- Основная зависимость: Тенденция движения зависит от положения (x), скорости (v) и массы (m).
- Формула: NKTg = f(x, v, m).
- Основные производные величины:
- Импульс (p): p = m × v
- Величина NKTg₁: Произведение положения и импульса (NKTg₁ = x × p).
- Величина NKTg₂: Произведение скорости изменения массы и импульса (NKTg₂ = (dm/dt) × p).
- Единица измерения: NKTm (Единица переменной инерции).
III. ПОДРОБНОЕ ОПИСАНИЕ АЛГОРИТМА 1. Процесс обработки данных Алгоритм анализирует тенденции движения через логические шаги:
- Шаг 1: Получение входных параметров: положение (x), скорость (v), масса (m) и скорость изменения массы (dm/dt).
- Шаг 2: Расчет линейного импульса p = m × v.
- Шаг 3: Расчет значений переменной инерции NKTg₁ и NKTg_2.
- Шаг 4: Классификация тенденции (Tendency) на основе знака значений:
- NKTg₁ > 0: Удаление от стабильного состояния.
- NKTg₁ < 0: Приближение к стабильному состоянию.
- NKTg₂> 0: Изменение массы поддерживает движение.
- NKTg₂< 0: Изменение массы препятствует движению.
IV. ИСПОЛНЯЕМЫЙ ИСХОДНЫЙ КОД 1. Исходный код высокого уровня (C++)
C++
#include <cstdio>
/**
* Библиотека расчета переменной инерции согласно Закону NKTg
* Все авторские права на логику расчетов и определение тенденций защищены.
*/
int main() {
// 1. Объявление параметров: x (положение), v (скорость), m (масса), dm_dt (скорость изменения m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Выполнение расчетов согласно Закону NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Вывод результатов в формате Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Классификация тенденции движения (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Удаление от стабильного состояния” :
n1 < 0 ? “Приближение к стабильному состоянию” : “Стабильное равновесие”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Изменение массы поддерживает движение” :
n2 < 0 ? “Изменение массы препятствует движению” : “Эффект изменения массы отсутствует”);
return 0;
}
2. Исходный код низкого уровня (Assembly x64)
; Логика обработки NKTg на уровне регистров микропроцессора
; Входные данные: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; загрузка m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; загрузка x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; загрузка dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. ОПРЕДЕЛЕНИЕ СТАБИЛЬНОГО СОСТОЯНИЯ Стабильное состояние в данном программном обеспечении определяется как состояние, при котором положение (x), скорость (v) и масса (m) взаимодействуют для поддержания структуры движения, предотвращения потери контроля и сохранения присущей объекту модели движения.
9. Portuguese (Português)
PUBLICAÇÃO DO DOSSIÊ DE DESCRIÇÃO DO SOFTWARE E ALGORITMO DA LEI NKTg DE INÉRCIA VARIÁVEL © 2026 Nguyễn Khánh Tùng. Todos os direitos reservados.
I. INFORMAÇÕES GERAIS
- Nome do software: Sistema de Cálculo de Dinâmica de Inércia Variável NKTg (NKTg Dynamics Calculator).
- Autor: Nguyễn Khánh Tùng
- Linguagens de programação: C++ (ISO/IEC 14882) e Assembly (x64).
II. BASE TEÓRICA: LEI NKTg DE INÉRCIA VARIÁVEL
O software executa com base nos princípios da Lei NKTg:
- Relação fundamental: A tendência do movimento depende da posição (x), velocidade (v) e massa (m).
- Fórmula: NKTg = f(x, v, m).
- Grandezas de produto fundamentais:
- Momento linear (p): p = m × v
- Grandeza NKTg₁: Produto da posição e do momento (NKTg₁ = x × p).
- Grandeza NKTg₂: Produto da taxa de variação da massa e do momento (NKTg₂ = (dm/dt) × p).
- Unidade de medida: NKTm (Unidade de inércia variável).
III. DESCRIÇÃO DETALHADA DO ALGORITMO
1. Procedimento de processamento de dados
O algoritmo analisa as tendências de movimento através de etapas lógicas:
- Etapa 1: Receber parâmetros de entrada: posição (x), velocidade (v), massa (m) e taxa de variação de massa (dm/dt).
- Etapa 2: Calcular o momento linear p = m × v.
- Etapa 3: Calcular os valores de inércia variável NKTg₁ e NKTg_2.
- Etapa 4: Classificar a tendência (Tendency) com base no sinal dos valores:
- NKTg₁ > 0: Afastando-se do estado estável.
- NKTg₁ < 0: Aproximando-se do estado estável.
- NKTg₂> 0: A variação de massa apoia o movimento.
- NKTg₂< 0: A variação de massa resiste ao movimento.
IV. CÓDIGO-FONTE DE EXECUÇÃO
1. Código-fonte de alto nível (C++)
C++
#include <cstdio>
/**
* Biblioteca de cálculo de Inércia Variável de acordo com a Lei NKTg
* Todos os direitos autorais reservados quanto à lógica de cálculo e definições de tendência.
*/
int main() {
// 1. Declarar parâmetros: x (posição), v (velocidade), m (massa), dm_dt (taxa de variação de m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Realizar cálculos de acordo com a Lei NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Emitir resultados no formato Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Classificação da tendência de movimento (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Afastando-se do estado estável” :
n1 < 0 ? “Aproximando-se do estado estável” : “Equilíbrio estável”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “A variação de massa apoia o movimento” :
n2 < 0 ? “A variação de massa resiste ao movimento” : “Sem efeito de variação de massa”);
return 0;
}
2. Código-fonte de baixo nível (Assembly x64)
; Lógica de processamento NKTg ao nível de registos do microprocessador
; Entradas: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; carregar m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; carregar x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; carregar dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINIÇÃO DE ESTADO ESTÁVEL
O estado estável neste software é definido como o estado no qual a posição (x), a velocidade (v) e a massa (m) interagem para manter a estrutura do movimento, evitar a perda de controlo e preservar o padrão de movimento inerente do objeto.
10. Arabic (العربية)
نشر ملف وصف البرمجيات وخوارزمية قانون NKTg للعطالة المتغيرة
© 2026 نغوين خانه تونغ. جميع الحقوق محفوظة.
أولاً: معلومات عامة
- اسم البرنامج: نظام حساب ديناميكيات العطالة المتغيرة NKTg (NKTg Dynamics Calculator).
- المؤلف: نغوين خانه تونغ
- لغات البرمجة: C++ (ISO/IEC 14882) و Assembly (x64).
ثانياً: الأساس النظري: قانون NKTg للعطالة المتغيرة
يعمل البرنامج بناءً على مبادئ قانون NKTg:
- العلاقة الأساسية: يعتمد ميل الحركة على الموقع (x)، والسرعة (v)، والكتلة (m).
- المعادلة: NKTg = f(x, v, m).
- كميات المنتج الأساسية:
- الزخم (p): p = m × v
- كمية NKTg₁: حاصل ضرب الموقع والزخم (NKTg₁ = x × p).
- كمية NKTg₂: حاصل ضرب معدل تغير الكتلة والزخم (NKTg₂ = (dm/dt) × p).
- وحدة القياس: NKTm (وحدة العطالة المتغيرة).
ثالثاً: وصف تفصيلي للخوارزمية
1. إجراءات معالجة البيانات
تقوم الخوارزمية بتحليل اتجاهات الحركة من خلال خطوات منطقية:
- الخطوة 1: استقبال معايير الإدخال: الموقع (x)، السرعة (v)، الكتلة (m)، ومعدل تغير الكتلة (dm/dt).
- الخطوة 2: حساب الزخم الخطي p = m × v.
- الخطوة 3: حساب قيم العطالة المتغيرة NKTg₁ و NKTg_2.
- الخطوة 4: تصنيف الميل (Tendency) بناءً على إشارة القيم:
- NKTg₁ > 0: الابتعاد عن الحالة المستقرة.
- NKTg₁ < 0: الاقتراب من الحالة المستقرة.
- NKTg₂> 0: تغير الكتلة يدعم الحركة.
- NKTg₂< 0: تغير الكتلة يعيق الحركة.
رابعاً: الكود المصدري للتنفيذ
1. كود المستوى العالي (C++)
C++
#include <cstdio>
/**
* مكتبة حساب العطالة المتغيرة وفقاً لقانون NKTg
* جميع حقوق الطبع والنشر محفوظة فيما يتعلق بمنطق الحساب وتعريفات الميل.
*/
int main() {
// 1. تعريف المعايير: x (الموقع)، v (السرعة)، m (الكتلة)، dm_dt (معدل تغير الكتلة)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. إجراء الحسابات وفقاً لقانون NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. إخراج النتائج بتنسيق سجل (Record)
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// تصنيف ميل الحركة (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “الابتعاد عن الحالة المستقرة” :
n1 < 0 ? “الاقتراب من الحالة المستقرة” : “توازن مستقر”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “تغير الكتلة يدعم الحركة” :
n2 < 0 ? “تغير الكتلة يعيق الحركة” : “لا يوجد تأثير لتغير الكتلة”);
return 0;
}
2. كود المستوى المنخفض (Assembly x64)
; منطق معالجة NKTg على مستوى سجلات المعالج الدقيق
; المدخلات: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; تحميل الكتلة m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; تحميل الموقع x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; تحميل معدل تغير الكتلة dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
خامساً: تعريف الحالة المستقرة
تُعرف الحالة المستقرة في هذا البرنامج بأنها الحالة التي يتفاعل فيها الموقع (x) والسرعة (v) والكتلة (m) للحفاظ على هيكل الحركة، وتجنب فقدان السيطرة، والحفاظ على نمط الحركة المتأصل للجسم.
11. Korean (한국어)
NKTg 가변 관성 법칙에 관한 소프트웨어 기술서 및 알고리즘 공개
© 2026 Nguyễn Khánh Tùng. All rights reserved.
I. 일반 정보
- 소프트웨어 명칭: NKTg 가변 역학 계산 시스템 (NKTg Dynamics Calculator).
- 저자: Nguyễn Khánh Tùng
- 프로그래밍 언어: C++ (ISO/IEC 14882) 및 Assembly (x64).
II. 이론적 기초: NKTg 가변 관성 법칙
본 소프트웨어는 NKTg 법칙의 원리에 따라 실행됩니다:
- 기본 관계: 운동 경향은 위치(x), 속도(v) 및 질량(m)에 의존합니다.
- 공식: NKTg = f(x, v, m).
- 핵심 산출량:
- 운동량 (p): p = m × v
- NKTg₁ 양: 위치와 운동량의 곱 (NKTg₁ = x × p).
- NKTg₂ 양: 질량 변화율과 운동량의 곱 (NKTg₂ = (dm/dt) × p).
- 측정 단위: NKTm (가변 관성 단위).
III. 상세 알고리즘 설명
1. 데이터 처리 절차
알고리즘은 논리적 단계를 통해 운동 경향을 분석합니다:
- 1단계: 입력 파라미터 수신: 위치(x), 속도(v), 질량(m) 및 질량 변화율(dm/dt).
- 2단계: 선형 운동량 p = m × v 계산.
- 3단계: 가변 관성 값 NKTg₁ 및 NKTg₂계산.
- 4단계: 값의 부호에 따른 경향(Tendency) 분류:
- NKTg₁ > 0: 안정 상태에서 멀어짐.
- NKTg₁ < 0: 안정 상태로 접근함.
- NKTg₂> 0: 질량 변화가 운동을 보조함.
- NKTg₂< 0: 질량 변화가 운동을 방해함.
IV. 실행 소스 코드
1. 고수준 소스 코드 (C++)
C++
#include <cstdio>
/**
* NKTg 법칙에 따른 가변 관성 계산 라이브러리
* 계산 로직 및 경향 정의에 관한 모든 저작권을 보유함.
*/
int main() {
// 1. 파라미터 선언: x (위치), v (속도), m (질량), dm_dt (질량 변화율)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. NKTg 법칙에 따른 계산 수행
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. 레코드 형식으로 결과 출력
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// 운동 경향 분류 (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “안정 상태에서 멀어짐” :
n1 < 0 ? “안정 상태로 접근함” : “안정적 평형”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “질량 변화가 운동을 보조함” :
n2 < 0 ? “질량 변화가 운동을 방해함” : “질량 변화 영향 없음”);
return 0;
}
2. 저수준 소스 코드 (Assembly x64)
; 마이크로프로세서 레지스터 레벨의 NKTg 처리 로직
; 입력: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; m 로드
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; x 로드
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; dm/dt 로드
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. 안정 상태의 정의
이 소프트웨어에서 안정 상태는 위치(x), 속도(v), 질량(m)이 상호작용하여 운동 구조를 유지하고, 제어 상실을 방지하며, 물체 고유의 운동 패턴을 보존하는 상태로 정의됩니다.
12. Italian (Italiano)
PUBBLICAZIONE DEL DOSSIER DI DESCRIZIONE DEL SOFTWARE E DELL’ALGORITMO DELLA LEGGE NKTg SULL’INERZIA VARIABILE
© 2026 Nguyễn Khánh Tùng. Tutti i diritti riservati.
I. INFORMAZIONI GENERALI
- Nome del software: Sistema di calcolo della Dinamica a Inerzia Variabile NKTg (NKTg Dynamics Calculator).
- Autore: Nguyễn Khánh Tùng
- Linguaggi di programmazione: C++ (ISO/IEC 14882) e Assembly (x64).
II. BASE TEORICA: LA LEGGE NKTg SULL’INERZIA VARIABILE
Il software opera sulla base dei principi della Legge NKTg:
- Relazione fondamentale: La tendenza del movimento dipende dalla posizione (x), dalla velocità (v) e dalla massa (m).
- Formula: NKTg = f(x, v, m).
- Grandezze prodotto fondamentali:
- Momento lineare (p): p = m × v
- Grandezza NKTg₁: Prodotto della posizione e del momento (NKTg₁ = x × p).
- Grandezza NKTg₂: Prodotto del tasso di variazione della massa e del momento (NKTg₂ = (dm/dt) × p).
- Unità di misura: NKTm (Unità di inerzia variabile).
III. DESCRIZIONE DETTAGLIATA DELL’ALGORITMO
1. Procedura di elaborazione dati
L’algoritmo analizza le tendenze del movimento attraverso passaggi logici:
- Passaggio 1: Ricezione dei parametri di input: posizione (x), velocità (v), massa (m) e tasso di variazione della massa (dm/dt).
- Passaggio 2: Calcolo del momento lineare p = m × v.
- Passaggio 3: Calcolo dei valori di inerzia variabile NKTg₁ e NKTg_2.
- Passaggio 4: Classificazione della tendenza (Tendency) in base al segno dei valori:
- NKTg₁ > 0: Allontanamento dallo stato stabile.
- NKTg₁ < 0: Avvicinamento allo stato stabile.
- NKTg₂> 0: La variazione di massa favorisce il movimento.
- NKTg₂< 0: La variazione di massa ostacola il movimento.
IV. CODICE SORGENTE DI ESECUZIONE
1. Codice sorgente di alto livello (C++)
C++
#include <cstdio>
/**
* Libreria di calcolo dell’Inerzia Variabile secondo la Legge NKTg
* Tutti i diritti d’autore riservati riguardo alla logica di calcolo e alle definizioni di tendenza.
*/
int main() {
// 1. Dichiarazione parametri: x (posizione), v (velocità), m (massa), dm_dt (tasso variazione m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Esecuzione dei calcoli secondo la Legge NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Output dei risultati in formato Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Classificazione della tendenza del movimento (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Allontanamento dallo stato stabile” :
n1 < 0 ? “Avvicinamento allo stato stabile” : “Equilibrio stabile”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “La variazione di massa favorisce il movimento” :
n2 < 0 ? “La variazione di massa ostacola il movimento” : “Nessun effetto della variazione di massa”);
return 0;
}
2. Codice sorgente di basso livello (Assembly x64)
; Logica di elaborazione NKTg a livello di registri del microprocessore
; Ingressi: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; carica m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; carica x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; carica dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINIZIONE DI STATO STABILE
Lo stato stabile in questo software è definito come lo stato in cui la posizione (x), la velocità (v) e la massa (m) interagiscono per mantenere la struttura del movimento, evitare la perdita di controllo e preservare il modello di movimento intrinseco dell’oggetto.
13. Dutch (Nederlands)
PUBLICATIE VAN HET SOFTWAREBESCHRIJVINGSDOSSIER EN HET ALGORITME VAN DE NKTg-WET OP VARIABELE TRAAGHEID
© 2026 Nguyễn Khánh Tùng. Alle rechten voorbehouden.
I. ALGEMENE INFORMATIE
- Softwarenaam: NKTg-rekenmachine voor variabele dynamica (NKTg Dynamics Calculator).
- Auteur: Nguyễn Khánh Tùng
- Programmeertalen: C++ (ISO/IEC 14882) en Assembly (x64).
II. THEORETISCHE BASIS: NKTg-WET OP VARIABELE TRAAGHEID
De software werkt op basis van de principes van de NKTg-wet:
- Fundamentele relatie: De bewegingstendens hangt af van positie (x), snelheid (v) en massa (m).
- Formule: NKTg = f(x, v, m).
- Kernproductgrootheden:
- Impuls (p): p = m × v
- Grootheid NKTg₁: Product van positie en impuls (NKTg₁ = x × p).
- Grootheid NKTg₂: Product van de snelheid van massavariatie en impuls (NKTg₂ = (dm/dt) × p).
- Meeteenheid: NKTm (Eenheid van variabele traagheid).
III. GEDETAILLEERDE ALGORITMEBESCHRIJVING
1. Gegevensverwerkingsprocedure
Het algoritme analyseert bewegingstendensen via logische stappen:
- Stap 1: Ontvangst van invoerparameters: positie (x), snelheid (v), massa (m) en massavariatiesnelheid (dm/dt).
- Stap 2: Berekening van de lineaire impuls p = m × v.
- Stap 3: Berekening van de variabele traagheidswaarden NKTg₁ en NKTg_2.
- Stap 4: Classificatie van de tendens (Tendency) op basis van het teken van de waarden:
- NKTg₁ > 0: Verwijdering van de stabiele toestand.
- NKTg₁ < 0: Toenadering tot de stabiele toestand.
- NKTg₂> 0: Massavariatie ondersteunt de beweging.
- NKTg₂< 0: Massavariatie belemmert de beweging.
IV. BRONCODE VOOR UITVOERING
1. Hogere programmeertaal (C++)
C++
#include <cstdio>
/**
* Bibliotheek voor berekening van Variabele Traagheid volgens de NKTg-wet.
* Alle auteursrechten voorbehouden met betrekking tot de rekenlogica en tendensdefinities.
*/
int main() {
// 1. Declareer parameters: x (positie), v (snelheid), m (massa), dm_dt (massavariatiesnelheid)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Voer berekeningen uit volgens de NKTg-wet
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Uitvoer van resultaten in Record-formaat
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Classificatie van de bewegingstendens (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Verwijdering van stabiele toestand” :
n1 < 0 ? “Toenadering tot stabiele toestand” : “Stabiel evenwicht”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Massavariatie ondersteunt de beweging” :
n2 < 0 ? “Massavariatie belemmert de beweging” : “Geen effect van massavariatie”);
return 0;
}
2. Lagere programmeertaal (Assembly x64)
; NKTg-verwerkingslogica op het niveau van microprocessorregisters
; Invoer: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; laad m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; laad x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; laad dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINITIE VAN STABIELE TOESTAND
De stabiele toestand in deze software wordt gedefinieerd als de toestand waarin positie (x), snelheid (v) en massa (m) op elkaar inwerken om de bewegingsstructuur te behouden, controleverlies te voorkomen en het inherente bewegingspatroon van het object te bewaren.
14. Polish (Polski)
PUBLIKACJA DOKUMENTACJI OPISU OPROGRAMOWANIA I ALGORYTMU PRAWA NKTg O ZMIENNEJ BEZWŁADNOŚCI
© 2026 Nguyễn Khánh Tùng. Wszelkie prawa zastrzeżone.
I. INFORMACJE OGÓLNE
- Nazwa oprogramowania: System obliczeniowy dynamiki zmiennej bezwładności NKTg (NKTg Dynamics Calculator).
- Autor: Nguyễn Khánh Tùng
- Języki programowania: C++ (ISO/IEC 14882) i Asembler (x64).
II. PODSTAWA TEORETYCZNA: PRAWO NKTg O ZMIENNEJ BEZWŁADNOŚCI
Oprogramowanie działa w oparciu o zasady Prawa NKTg:
- Podstawowa zależność: Tendencja ruchu zależy od położenia (x), prędkości (v) i masy (m).
- Wzór: NKTg = f(x, v, m).
- Kluczowe wielkości wynikowe:
- Pęd (p): p = m × v
- Wielkość NKTg₁: Iloczyn położenia i pędu (NKTg₁ = x × p).
- Wielkość NKTg₂: Iloczyn szybkości zmian masy i pędu (NKTg₂ = (dm/dt) × p).
- Jednostka miary: NKTm (Jednostka zmiennej bezwładności).
III. SZCZEGÓŁOWY OPIS ALGORYTMU
1. Procedura przetwarzania danych
Algorytm analizuje tendencje ruchu poprzez logiczne kroki:
- Krok 1: Odebranie parametrów wejściowych: położenie (x), prędkość (v), masa (m) i szybkość zmiany masy (dm/dt).
- Krok 2: Obliczenie pędu liniowego p = m × v.
- Krok 3: Obliczenie wartości zmiennej bezwładności NKTg₁ i NKTg_2.
- Krok 4: Klasyfikacja tendencji (Tendency) na podstawie znaku wartości:
- NKTg₁ > 0: Oddalanie się od stanu stabilnego.
- NKTg₁ < 0: Zbliżanie się do stanu stabilnego.
- NKTg₂> 0: Zmiana masy wspomaga ruch.
- NKTg₂< 0: Zmiana masy utrudnia ruch.
IV. KOD ŹRÓDŁOWY WYKONAWCZY
1. Kod źródłowy wysokiego poziomu (C++)
C++
#include <cstdio>
/**
* Biblioteka obliczeń Zmiennej Bezwładności według Prawa NKTg.
* Wszelkie prawa autorskie zastrzeżone w zakresie logiki obliczeń i definicji tendencji.
*/
int main() {
// 1. Deklaracja parametrów: x (położenie), v (prędkość), m (masa), dm_dt (szybkość zmiany m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Wykonanie obliczeń zgodnie z Prawem NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Eksport wyników w formacie Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Klasyfikacja tendencji ruchu (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Oddalanie się od stanu stabilnego” :
n1 < 0 ? “Zbliżanie się do stanu stabilnego” : “Równowaga stabilna”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Zmiana masy wspomaga ruch” :
n2 < 0 ? “Zmiana masy utrudnia ruch” : “Brak efektu zmiany masy”);
return 0;
}
2. Kod źródłowy niskiego poziomu (Asembler x64)
; Logika przetwarzania NKTg na poziomie rejestrów mikroprocesora
; Wejścia: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; załaduj m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; załaduj x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; załaduj dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINICJA STANU STABILNEGO
Stan stabilny w niniejszym oprogramowaniu definiuje się jako stan, w którym położenie (x), prędkość (v) i masa (m) współdziałają w celu utrzymania struktury ruchu, uniknięcia utraty kontroli i zachowania naturalnego wzorca ruchu obiektu.
15. Turkish (Türkçe)
DEĞİŞKEN EYLEMSİZLİK NKTg KANUNU YAZILIM AÇIKLAMA VE ALGORİTMA DOSYASI YAYINI
© 2026 Nguyễn Khánh Tùng. Tüm hakları saklıdır.
I. GENEL BİLGİLER
- Yazılım Adı: NKTg Değişken Dinamik Hesaplama Sistemi (NKTg Dynamics Calculator).
- Yazar: Nguyễn Khánh Tùng
- Programlama Dilleri: C++ (ISO/IEC 14882) ve Assembly (x64).
II. TEORİK TEMEL: DEĞİŞKEN EYLEMSİZLİK NKTg KANUNU
Yazılım, NKTg Kanunu ilkelerine dayanarak çalışır:
- Temel İlişki: Hareket eğilimi konuma (x), hıza (v) ve kütleye (m) bağlıdır.
- Formül: NKTg = f(x, v, m).
- Temel Ürün Büyüklükleri:
- Momentum (p): p = m × v
- NKTg₁ Büyüklüğü: Konum ve momentumun çarpımı (NKTg₁ = x × p).
- NKTg₂ Büyüklüğü: Kütle değişim hızı ve momentumun çarpımı (NKTg₂ = (dm/dt) × p).
- Ölçü Birimi: NKTm (Değişken eylemsizlik birimi).
III. DETAYLI ALGORİTMA AÇIKLAMASI
1. Veri İşleme Prosedürü
Algoritma, hareket eğilimlerini mantıksal adımlarla analiz eder:
- Adım 1: Giriş parametrelerinin alınması: konum (x), hız (v), kütle (m) ve kütle değişim hızı (dm/dt).
- Adım 2: Doğrusal momentumun hesaplanması p = m × v.
- Adım 3: Değişken eylemsizlik değerleri NKTg₁ ve NKTg_2’nin hesaplanması.
- Adım 4: Değerlerin işaretine göre eğilimin (Tendency) sınıflandırılması:
- NKTg₁ > 0: Kararlı durumdan uzaklaşma.
- NKTg₁ < 0: Kararlı duruma yaklaşma.
- NKTg₂> 0: Kütle değişimi hareketi destekler.
- NKTg₂< 0: Kütle değişimi hareketi engeller.
IV. YÜRÜTME KAYNAK KODU
1. Yüksek Seviyeli Kaynak Kod (C++)
C++
#include <cstdio>
/**
* NKTg Kanununa göre Değişken Eylemsizlik hesaplama kütüphanesi
* Hesaplama mantığı ve eğilim tanımlarına ilişkin tüm telif hakları saklıdır.
*/
int main() {
// 1. Parametrelerin bildirimi: x (konum), v (hız), m (kütle), dm_dt (kütle değişim hızı)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. NKTg Kanununa göre hesaplamaları gerçekleştirme
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Sonuçları Kayıt (Record) formatında çıktı alma
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Hareket Eğilimi Sınıflandırması (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Kararlı durumdan uzaklaşıyor” :
n1 < 0 ? “Kararlı duruma yaklaşıyor” : “Kararlı denge”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Kütle değişimi hareketi destekliyor” :
n2 < 0 ? “Kütle değişimi hareketi engelliyor” : “Kütle değişimi etkisi yok”);
return 0;
}
2. Düşük Seviyeli Kaynak Kod (Assembly x64)
; Mikroişlemci kayıtçısı düzeyinde NKTg işleme mantığı
; Girişler: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; m’yi yükle
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; x’i yükle
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; dm/dt’yi yükle
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. KARARLI DURUM TANIMI
Bu yazılımdaki kararlı durum; konum (x), hız (v) ve kütlenin (m), hareket yapısını korumak, kontrol kaybını önlemek ve nesnenin doğal hareket modelini sürdürmek için etkileşime girdiği durum olarak tanımlanır.
16. Persian (فارسی)
انتشار پرونده توصیف نرمافزار و الگوریتم قانون NKTg درباره اینرسی متغیر
© 2026 نوین خان تانگ. تمامی حقوق محفوظ است.
۱. اطلاعات عمومی
- نام نرمافزار: سیستم محاسباتی دینامیک اینرسی متغیر NKTg (NKTg Dynamics Calculator).
- نویسنده: نوین خان تانگ
- زبانهای برنامهنویسی: C++ (ISO/IEC 14882) و اسمبلی (x64).
۲. مبنای نظری: قانون NKTg درباره اینرسی متغیر
این نرمافزار بر اساس اصول قانون NKTg اجرا میشود:
- رابطه اساسی: تمایل حرکت به موقعیت (x)، سرعت (v) و جرم (m) بستگی دارد.
- فرمول: NKTg = f(x, v, m).
- کمیتهای محصول اصلی:
- تکانه (p): p = m × v
- کمیت NKTg₁: حاصلضرب موقعیت و تکانه (NKTg₁ = x × p).
- کمیت NKTg₂: حاصلضرب نرخ تغییرات جرم و تکانه (NKTg₂ = (dm/dt) × p).
- واحد اندازهگیری: NKTm (واحد اینرسی متغیر).
۳. توصیف دقیق الگوریتم
۱. فرآیند پردازش دادهها
الگوریتم تمایلات حرکت را از طریق مراحل منطقی تحلیل میکند:
- مرحله ۱: دریافت پارامترهای ورودی: موقعیت (x)، سرعت (v)، جرم (m) و نرخ تغییر جرم (dm/dt).
- مرحله ۲: محاسبه تکانه خطی p = m × v.
- مرحله ۳: محاسبه مقادیر اینرسی متغیر NKTg₁ و NKTg_2.
- مرحله ۴: طبقهبندی تمایل (Tendency) بر اساس علامت مقادیر:
- NKTg₁ > 0: دور شدن از حالت پایدار.
- NKTg₁ < 0: نزدیک شدن به حالت پایدار.
- NKTg₂> 0: تغییرات جرم از حرکت پشتیبانی میکند.
- NKTg₂< 0: تغییرات جرم مانع حرکت میشود.
۴. کد منبع اجرایی
۱. کد منبع سطح بالا (C++)
C++
#include <cstdio>
/**
* کتابخانه محاسبات اینرسی متغیر بر اساس قانون NKTg
* تمامی حقوق مادی و معنوی در رابطه با منطق محاسباتی و تعاریف تمایل محفوظ است.
*/
int main() {
// ۱. تعریف پارامترها: x (موقعیت)، v (سرعت)، m (جرم)، dm_dt (نرخ تغییر جرم)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// ۲. انجام محاسبات طبق قانون NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// ۳. خروجی نتایج در قالب رکورد
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// طبقهبندی تمایل حرکت (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “در حال دور شدن از حالت پایدار” :
n1 < 0 ? “در حال نزدیک شدن به حالت پایدار” : “تعادل پایدار”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “تغییرات جرم از حرکت پشتیبانی میکند” :
n2 < 0 ? “تغییرات جرم مانع حرکت میشود” : “بدون تأثیر تغییرات جرم”);
return 0;
}
۲. کد منبع سطح پایین (Assembly x64)
; منطق پردازش NKTg در سطح ثباتهای ریزپردازنده
; ورودیها: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; بارگذاری جرم m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; بارگذاری موقعیت x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; بارگذاری نرخ تغییر جرم dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
۵. تعریف حالت پایدار
حالت پایدار در این نرمافزار به حالتی تعریف میشود که در آن موقعیت (x)، سرعت (v) و جرم (m) برای حفظ ساختار حرکت، جلوگیری از کاهش کنترل و محافظت از الگوی حرکت ذاتی جسم با یکدیگر تعامل دارند.
17. Hebrew (עברית)
פרסום תיק תיאור תוכנה ואלגוריתם של חוק NKTg להתמדה משתנה
© 2026 נגויין קהאן טונג. כל הזכויות שמורות.
I. מידע כללי
- שם התוכנה: מערכת חישוב דינמיקה של התמדה משתנה NKTg (NKTg Dynamics Calculator).
- מחבר: נגויין קהאן טונג
- שפות תכנות: C++ (ISO/IEC 14882) ו-Assembly (x64).
II. בסיס תיאורטי: חוק NKTg להתמדה משתנה
התוכנה פועלת על פי עקרונות חוק NKTg:
- קשר בסיסי: נטיית התנועה תלויה במיקום (x), מהירות (v) ומסה (m).
- נוסחה: NKTg = f(x, v, m).
- גדלי תוצר מרכזיים:
- תנע (p): p = m × v
- גודל NKTg₁: מכפלת המיקום והתנע (NKTg₁ = x × p).
- גודל NKTg₂: מכפלת קצב שינוי המסה והתנע (NKTg₂ = (dm/dt) × p).
- יחידת מידה: NKTm (יחידת התמדה משתנה).
III. תיאור מפורט של האלגוריתם
1. תהליך עיבוד נתונים
האלגוריתם מנתח מגמות תנועה דרך שלבים לוגיים:
- שלב 1: קבלת פרמטרי קלט: מיקום (x), מהירות (v), מסה (m) וקצב שינוי מסה (dm/dt).
- שלב 2: חישוב התנע הקווי p = m × v.
- שלב 3: חישוב ערכי ההתמדה המשתנה NKTg₁ ו-NKTg_2.
- שלב 4: סיווג המגמה (Tendency) על פי סימן הערכים:
- NKTg₁ > 0: התרחקות ממצב יציב.
- NKTg₁ < 0: התקרבות למצב יציב.
- NKTg₂> 0: שינוי המסה תומך בתנועה.
- NKTg₂< 0: שינוי המסה מעכב את התנועה.
IV. קוד מקור לביצוע
1. קוד מקור ברמה גבוהה (C++)
C++
#include <cstdio>
/**
* ספריית חישוב התמדה משתנה על פי חוק NKTg
* כל זכויות היוצרים שמורות לגבי לוגיקת החישוב והגדרות המגמה.
*/
int main() {
// 1. הצהרת פרמטרים: x (מיקום), v (מהירות), m (מסה), dm_dt (קצב שינוי מסה)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. ביצוע חישובים על פי חוק NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. פלט תוצאות בפורמט רשומה (Record)
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// סיווג מגמת תנועה (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “מתרחק ממצב יציב” :
n1 < 0 ? “מתקרב למצב יציב” : “שיווי משקל יציב”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “שינוי המסה תומך בתנועה” :
n2 < 0 ? “שינוי המסה מעכב את התנועה” : “אין השפעה של שינוי מסה”);
return 0;
}
2. קוד מקור ברמה נמוכה (Assembly x64)
; לוגיקת עיבוד NKTg ברמת אוגרי המעבד
; קלטים: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; טען m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; טען x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; טען dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. הגדרת מצב יציב
מצב יציב בתוכנה זו מוגדר כמצב שבו מיקום (x), מהירות (v) ומסה (m) מקיימים אינטראקציה לשמירה על מבנה התנועה, מניעת אובדן שליטה ושימור דפוס התנועה המקורי של האובייקט.
18. Swedish (Svenska)
OFFENTLIGGÖRANDE AV PROGRAMVARUBESKRIVNING OCH ALGORITM FÖR NKTg-LAGEN OM VARIABEL TRÖGHET
© 2026 Nguyễn Khánh Tùng. Alla rättigheter förbehållna.
I. ALLMÄN INFORMATION
- Programvarans namn: NKTg Beräkningssystem för variabel dynamik (NKTg Dynamics Calculator).
- Författare: Nguyễn Khánh Tùng
- Programmeringsspråk: C++ (ISO/IEC 14882) och Assembly (x64).
II. TEORETISK GRUND: NKTg-LAGEN OM VARIABEL TRÖGHET
Programvaran körs baserat på principerna i NKTg-lagen:
- Grundläggande samband: Rörelsetendensen beror på position (x), hastighet (v) och massa (m).
- Formel: NKTg = f(x, v, m).
- Kärnproduktsstorheter:
- Rörelsemängd (p): p = m × v
- NKTg₁-storhet: Produkten av position och rörelsemängd (NKTg₁ = x × p).
- NKTg₂-storhet: Produkten av massvariationshastighet och rörelsemängd (NKTg₂ = (dm/dt) × p).
- Måttenhet: NKTm (Enhet för variabel tröghet).
III. DETALJERAD ALGORITMBESKRIVNING
1. Databehandlingsprocedur
Algoritmen analyserar rörelsetendenser genom logiska steg:
- Steg 1: Mottagning av ingångsparametrar: position (x), hastighet (v), massa (m) och massförändringshastighet (dm/dt).
- Steg 2: Beräkning av linjär rörelsemängd p = m × v.
- Steg 3: Beräkning av variabla tröghetsvärden NKTg₁ och NKTg_2.
- Steg 4: Klassificering av tendensen (Tendency) baserat på värdenas tecken:
- NKTg₁ > 0: Rör sig bort från stabilt tillstånd.
- NKTg₁ < 0: Rör sig mot stabilt tillstånd.
- NKTg₂> 0: Massvariation stödjer rörelsen.
- NKTg₂< 0: Massvariation motverkar rörelsen.
IV. KÄLLKOD FÖR EXEKVERING
1. Högnivåkällkod (C++)
C++
#include <cstdio>
/**
* Bibliotek för beräkning av variabel tröghet enligt NKTg-lagen
* Alla upphovsrätter förbehållna gällande beräkningslogik och tendensdefinitioner.
*/
int main() {
// 1. Deklarera parametrar: x (position), v (hastighet), m (massa), dm_dt (massförändringshastighet)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Utför beräkningar enligt NKTg-lagen
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Exportera resultat i Record-format
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Klassificering av rörelsetendens (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Rör sig bort från stabilt tillstånd” :
n1 < 0 ? “Rör sig mot stabilt tillstånd” : “Stabil jämvikt”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Massvariation stödjer rörelsen” :
n2 < 0 ? “Massvariation motverkar rörelsen” : “Ingen massvariationseffekt”);
return 0;
}
2. Lågnivåkällkod (Assembly x64)
; NKTg-behandlingslogik på mikroprocessorns registernivå
; Indata: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; ladda m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; ladda x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; ladda dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINITION AV STABILT TILLSTÅND
Stabilt tillstånd definieras i denna programvara som det tillstånd där position (x), hastighet (v) och massa (m) samverkar för att upprätthålla rörelsestrukturen, undvika förlust av kontroll och bevara objektets inneboende rörelsemönster.
19. Greek (Ελληνικά)
ΔΗΜΟΣΙΕΥΣΗ ΦΑΚΕΛΟΥ ΠΕΡΙΓΡΑΦΗΣ ΛΟΓΙΣΜΙΚΟΥ ΚΑΙ ΑΛΓΟΡΙΘΜΟΥ ΤΟΥ ΝΟΜΟΥ NKTg ΓΙΑ ΤΗ ΜΕΤΑΒΛΗΤΗ ΑΔΡΑΝΕΙΑ
© 2026 Nguyễn Khánh Tùng. Με επιφύλαξη παντός δικαιώματος.
I. ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ
- Όνομα Λογισμικού: Σύστημα Υπολογισμού Δυναμικής Μεταβλητής Αδράνειας NKTg (NKTg Dynamics Calculator).
- Δημιουργός: Nguyễn Khánh Tùng
- Γλώσσες Προγραμματισμού: C++ (ISO/IEC 14882) και Assembly (x64).
II. ΘΕΩΡΗΤΙΚΗ ΒΑΣΗ: ΝΟΜΟΣ NKTg ΓΙΑ ΤΗ ΜΕΤΑΒΛΗΤΗ ΑΔΡΑΝΕΙΑ
Το λογισμικό εκτελείται με βάση τις αρχές του Νόμου NKTg:
- Θεμελιώδης Σχέση: Η τάση κίνησης εξαρτάται από τη θέση (x), την ταχύτητα (v) και τη μάζα (m).
- Τύπος: NKTg = f(x, v, m).
- Βασικά Παραγόμενα Μεγέθη:
- Ορμή (p): p = m × v
- Μέγεθος NKTg₁: Γινόμενο θέσης και ορμής (NKTg₁ = x × p).
- Μέγεθος NKTg₂: Γινόμενο του ρυθμού μεταβολής της μάζας και της ορμής (NKTg₂ = (dm/dt) × p).
- Μονάδα Μέτρησης: NKTm (Μονάδα μεταβλητής αδράνειας).
III. ΛΕΠΤΟΜΕΡΗΣ ΠΕΡΙΓΡΑΦΗ ΑΛΓΟΡΙΘΜΟΥ
1. Διαδικασία Επεξεργασίας Δεδομένων
Ο αλγόριθμος αναλύει τις τάσεις κίνησης μέσω λογικών βημάτων:
- Βήμα 1: Λήψη παραμέτρων εισόδου: θέση (x), ταχύτητα (v), μάζα (m) και ρυθμός μεταβολής μάζας (dm/dt).
- Βήμα 2: Υπολογισμός της γραμμικής ορμής p = m × v.
- Βήμα 3: Υπολογισμός των τιμών μεταβλητής αδράνειας NKTg₁ και NKTg_2.
- Βήμα 4: Ταξινόμηση της τάσης (Tendency) με βάση το πρόσημο των τιμών:
- NKTg₁ > 0: Απομάκρυνση από την ευσταθή κατάσταση.
- NKTg₁ < 0: Προσέγγιση προς την ευσταθή κατάσταση.
- NKTg₂> 0: Η μεταβολή της μάζας υποστηρίζει την κίνηση.
- NKTg₂< 0: Η μεταβολή της μάζας παρεμποδίζει την κίνηση.
IV. ΠΗΓΑΙΟΣ ΚΩΔΙΚΑΣ ΕΚΤΕΛΕΣΗΣ
1. Πηγαίος Κώδικας Υψηλού Επιπέδου (C++)
C++
#include <cstdio>
/**
* Βιβλιοθήκη υπολογισμού Μεταβλητής Αδράνειας σύμφωνα με τον Νόμο NKTg
* Με επιφύλαξη παντός δικαιώματος πνευματικής ιδιοκτησίας σχετικά με τη λογική υπολογισμού και τους ορισμούς τάσεων.
*/
int main() {
// 1. Δήλωση παραμέτρων: x (θέση), v (ταχύτητα), m (μάζα), dm_dt (ρυθμός μεταβολής m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Εκτέλεση υπολογισμών σύμφωνα με τον Νόμο NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Εξαγωγή αποτελεσμάτων σε μορφή Εγγραφής (Record)
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Ταξινόμηση Τάσης Κίνησης (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Απομάκρυνση από ευσταθή κατάσταση” :
n1 < 0 ? “Προσέγγιση προς ευσταθή κατάσταση” : “Ευσταθής ισορροπία”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Η μεταβολή μάζας υποστηρίζει την κίνηση” :
n2 < 0 ? “Η μεταβολή μάζας εμποδίζει την κίνηση” : “Κανένα αποτέλεσμα μεταβολής μάζας”);
return 0;
}
2. Πηγαίος Κώδικας Χαμηλού Επιπέδου (Assembly x64)
; Λογική επεξεργασίας NKTg στο επίπεδο καταχωρητών μικροεπεξεργαστή
; Είσοδοι: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; φόρτωση m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; φόρτωση x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; φόρτωση dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. ΟΡΙΣΜΟΣ ΕΥΣΤΑΘΟΥΣ ΚΑΤΑΣΤΑΣΗΣ
Η ευσταθής κατάσταση σε αυτό το λογισμικό ορίζεται ως η κατάσταση στην οποία η θέση (x), η ταχύτητα (v) και η μάζα (m) αλληλεπιδρούν για να διατηρήσουν τη δομή της κίνησης, να αποφύγουν την απώλεια ελέγχου και να διαφυλάξουν το εγγενές πρότυπο κίνησης του αντικειμένου.
20. Indonesian (Bahasa Indonesia)
PUBLIKASI BERKAS DESKRIPSI PERANGKAT LUNAK DAN ALGORITMA HUKUM NKTg TENTANG INERSIA VARIABEL
© 2026 Nguyễn Khánh Tùng. Hak cipta dilindungi undang-undang.
I. INFORMASI UMUM
- Nama Perangkat Lunak: Sistem Kalkulasi Dinamika Inersia Variabel NKTg (NKTg Dynamics Calculator).
- Penulis: Nguyễn Khánh Tùng
- Bahasa Pemrograman: C++ (ISO/IEC 14882) dan Assembly (x64).
II. DASAR TEORI: HUKUM NKTg TENTANG INERSIA VARIABEL
Perangkat lunak ini berjalan berdasarkan prinsip-prinsip Hukum NKTg:
- Hubungan Dasar: Kecenderungan gerak bergantung pada posisi (x), kecepatan (v), dan massa (m).
- Rumus: NKTg = f(x, v, m).
- Besaran Produk Inti:
- Momentum (p): p = m × v
- Besaran NKTg₁: Produk dari posisi dan momentum (NKTg₁ = x × p).
- Besaran NKTg₂: Produk dari laju variasi massa dan momentum (NKTg₂ = (dm/dt) × p).
- Satuan Pengukuran: NKTm (Satuan inersia variabel).
III. DESKRIPSI ALGORITMA TERPERINCI
1. Prosedur Pemrosesan Data
Algoritma menganalisis kecenderungan gerak melalui langkah-langkah logis:
- Langkah 1: Menerima parameter input: posisi (x), kecepatan (v), massa (m), dan laju perubahan massa (dm/dt).
- Langkah 2: Menghitung momentum linier p = m × v.
- Langkah 3: Menghitung nilai inersia variabel NKTg₁ dan NKTg_2.
- Langkah 4: Mengklasifikasikan kecenderungan (Tendency) berdasarkan tanda nilai:
- NKTg₁ > 0: Menjauh dari keadaan stabil.
- NKTg₁ < 0: Mendekat ke keadaan stabil.
- NKTg₂> 0: Variasi massa mendukung pergerakan.
- NKTg₂< 0: Variasi massa menghambat pergerakan.
IV. KODE SUMBER EKSEKUSI
1. Kode Sumber Tingkat Tinggi (C++)
C++
#include <cstdio>
/**
* Pustaka kalkulasi Inersia Variabel menurut Hukum NKTg
* Hak cipta dilindungi undang-undang terkait logika kalkulasi dan definisi kecenderungan.
*/
int main() {
// 1. Deklarasi parameter: x (posisi), v (kecepatan), m (massa), dm_dt (laju variasi m)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. Melakukan kalkulasi menurut Hukum NKTg
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. Menghasilkan output hasil dalam format Record
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// Klasifikasi Kecenderungan Gerak (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “Menjauh dari keadaan stabil” :
n1 < 0 ? “Mendekat ke keadaan stabil” : “Keseimbangan stabil”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “Variasi massa mendukung pergerakan” :
n2 < 0 ? “Variasi massa menghambat pergerakan” : “Tidak ada efek variasi massa”);
return 0;
}
2. Kode Sumber Tingkat Rendah (Assembly x64)
; Logika pemrosesan NKTg pada tingkat register mikroprosesor
; Input: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; muat m
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; muat x
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; muat dm/dt
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. DEFINISI KEADAAN STABIL
Keadaan stabil dalam perangkat lunak ini didefinisikan sebagai keadaan di mana posisi (x), kecepatan (v), dan massa (m) berinteraksi untuk menjaga struktur gerak, menghindari kehilangan kendali, dan mempertahankan pola gerak inheren dari objek tersebut.
21. Hindi (हिन्दी)
परिवर्तनीय जड़त्व के NKTg नियम के लिए सॉफ्टवेयर विवरण और एल्गोरिदम दस्तावेज़ का प्रकाशन
© 2026 Nguyễn Khánh Tùng. सर्वाधिकार सुरक्षित।
I. सामान्य जानकारी
- सॉफ्टवेयर का नाम: NKTg परिवर्तनीय गतििकी गणना प्रणाली (NKTg Dynamics Calculator).
- लेखक: Nguyễn Khánh Tùng
- प्रोग्रामिंग भाषाएँ: C++ (ISO/IEC 14882) और असेंबली (x64)।
II. सैद्धांतिक आधार: परिवर्तनीय जड़त्व का NKTg नियम
यह सॉफ्टवेयर NKTg नियम के सिद्धांतों के आधार पर कार्य करता है:
- मौलिक संबंध: गति की प्रवृत्ति स्थिति (x), वेग (v) और द्रव्यमान (m) पर निर्भर करती है।
- सूत्र: NKTg = f(x, v, m)
- मुख्य उत्पाद राशियाँ:
- संवेग (p): p = m × v
- NKTg₁ राशि: स्थिति और संवेग का गुणनफल (NKTg₁ = x × p).
- NKTg₂ राशि: द्रव्यमान परिवर्तन की दर और संवेग का गुणनफल (NKTg₂ = (dm/dt) × p).
- मापन इकाई: NKTm (परिवर्तनीय जड़त्व की इकाई)।
III. विस्तृत एल्गोरिदम विवरण
1. डेटा प्रसंस्करण प्रक्रिया
एल्गोरिदम तार्किक चरणों के माध्यम से गति प्रवृत्तियों का विश्लेषण करता है:
- चरण 1: इनपुट पैरामीटर प्राप्त करना: स्थिति (x), वेग (v), द्रव्यमान (m) और द्रव्यमान परिवर्तन की दर (dm/dt)।
- चरण 2: रैखिक संवेग p = m × v की गणना करना।
- चरण 3: परिवर्तनीय जड़त्व मान NKTg₁ और NKTg₂की गणना करना।
- चरण 4: मानों के चिह्न के आधार पर प्रवृत्ति (Tendency) का वर्गीकरण करना:
- NKTg₁ > 0: स्थिर अवस्था से दूर जाना।
- NKTg₁ < 0: स्थिर अवस्था की ओर जाना।
- NKTg₂> 0: द्रव्यमान परिवर्तन गति का समर्थन करता है।
- NKTg₂< 0: द्रव्यमान परिवर्तन गति का विरोध करता है।
IV. निष्पादन स्रोत कोड (SOURCE CODE)
1. उच्च–स्तरीय स्रोत कोड (C++)
C++
#include <cstdio>
/**
* NKTg नियम के अनुसार परिवर्तनीय जड़त्व गणना लाइब्रेरी
* गणना तर्क और प्रवृत्ति परिभाषाओं के संबंध में सभी सर्वाधिकार सुरक्षित हैं।
*/
int main() {
// 1. पैरामीटर घोषित करें: x (स्थिति), v (वेग), m (द्रव्यमान), dm_dt (द्रव्यमान परिवर्तन दर)
double x = 2.0, v = 3.0, m = 5.0, dm_dt = -0.5;
// 2. NKTg नियम के अनुसार गणना करें
double p = m * v; // p = m * v
double n1 = x * p; // NKTg1 = x * p
double n2 = dm_dt * p; // NKTg2 = (dm/dt) * p
// 3. रिकॉर्ड प्रारूप में परिणाम आउटपुट करें
printf(“{ p = %.1f\n nktg1 = %.1f\n nktg2 = %.1f\n”, p, n1, n2);
// गति प्रवृत्ति वर्गीकरण (Tendency Classification)
printf(” tendency1 = \”%s\”\n”,
n1 > 0 ? “स्थिर अवस्था से दूर जा रहा है” :
n1 < 0 ? “स्थिर अवस्था की ओर जा रहा है” : “स्थिर संतुलन”);
printf(” tendency2 = \”%s\” }”,
n2 > 0 ? “द्रव्यमान परिवर्तन गति का समर्थन करता है” :
n2 < 0 ? “द्रव्यमान परिवर्तन गति का विरोध करता है” : “द्रव्यमान परिवर्तन का कोई प्रभाव नहीं”);
return 0;
}
2. निम्न–स्तरीय स्रोत कोड (Assembly x64)
; माइक्रोप्रोसेसर रजिस्टर स्तर पर NKTg प्रसंस्करण तर्क
; इनपुट: xmm0(x), xmm1(v), xmm2(m), xmm3(dm/dt)
movsd xmm4, xmm2 ; m लोड करें
mulsd xmm4, xmm1 ; p = m * v
movsd xmm5, xmm0 ; x लोड करें
mulsd xmm5, xmm4 ; NKTg1 = x * p
movsd xmm6, xmm3 ; dm/dt लोड करें
mulsd xmm6, xmm4 ; NKTg2 = (dm/dt) * p
V. स्थिर अवस्था की परिभाषा
इस सॉफ्टवेयर में स्थिर अवस्था को उस अवस्था के रूप में परिभाषित किया गया है जहाँ स्थिति (x), वेग (v) और द्रव्यमान (m) गति की संरचना को बनाए रखने, नियंत्रण खोने से बचने और वस्तु के अंतर्निहित गति पैटर्न को संरक्षित करने के लिए परस्पर क्रिया करते हैं।